
The rotary actuator is a hydraulic actuator that converts hydraulic energy into mechanical energy to achieve continuous rotation of the output shaft. It can achieve 360° continuous rotation. The rotation speed and torque can be adjusted according to the flow and pressure of the hydraulic system. It has high positioning accuracy and is suitable for occasions that require precise rotation angle and speed control.

The swing cylinder, also known as the swing hydraulic motor, is a hydraulic actuator that realizes the reciprocating swing of the output shaft within a certain angle range. Its structure is relatively simple and the output torque is relatively small, but it can provide enough power to complete the corresponding work within the designed swing angle range. The swing frequency is generally low and is often used in working devices that only need to swing within a specific angle range.
So, what are the specific differences between the two?
Structural Features
Rotary actuator: usually composed of a cylinder body, a piston, a piston rod, a rotating shaft, a seal, etc. The piston makes a linear reciprocating motion in the cylinder body, and the linear motion of the piston is converted into the rotational motion of the rotating shaft through a mechanical device, thereby realizing the continuous rotation of the output shaft. Its structure is relatively complex, and a special conversion mechanism is required to achieve the conversion from linear motion to rotational motion.
Swing cylinder: mainly composed of a cylinder barrel, piston, piston rod, swing shaft, and other components. The piston reciprocates in the cylinder, driving the piston rod and the swing shaft connected to it to swing at a certain angle. The general angle range is less than 360°, and the common ones are 90°, 180°, etc. Its structure is relatively simple, without a complex motion conversion mechanism.
Working Principle
Rotary actuator: The hydraulic oil enters one side of the cylinder body, pushing the piston to make a linear motion. The piston drives the rotating shaft to rotate through the transmission mechanism such as rack and gear. At the same time, the return oil flows out from the other side of the cylinder body. When the inlet and outlet direction of the hydraulic oil changes, the movement direction of the piston changes, and the rotation direction of the rotating shaft also changes accordingly, thereby realizing the forward and reverse continuous rotation of the output shaft.
Swinging cylinder: When the hydraulic oil enters one chamber of the cylinder, it pushes the piston to move to the other side, and the piston rod drives the swing shaft to swing around the journal so that the working parts connected to the swing shaft can swing. When the hydraulic oil enters the other chamber, the piston moves in the opposite direction, and the swing shaft also swings in the opposite direction.
Movement Mode
Rotary actuator: It can achieve 360° continuous rotation movement. Its movement process is relatively smooth. The speed can be adjusted according to the flow and pressure of the hydraulic system. It is suitable for occasions that require precise control of the rotation angle and speed.
Swing cylinder: It can only do reciprocating swinging movement within a certain angle range and cannot achieve continuous 360° rotation. Its swinging speed and angle depend on the structural parameters of the cylinder and the parameters of the hydraulic system.
Applications
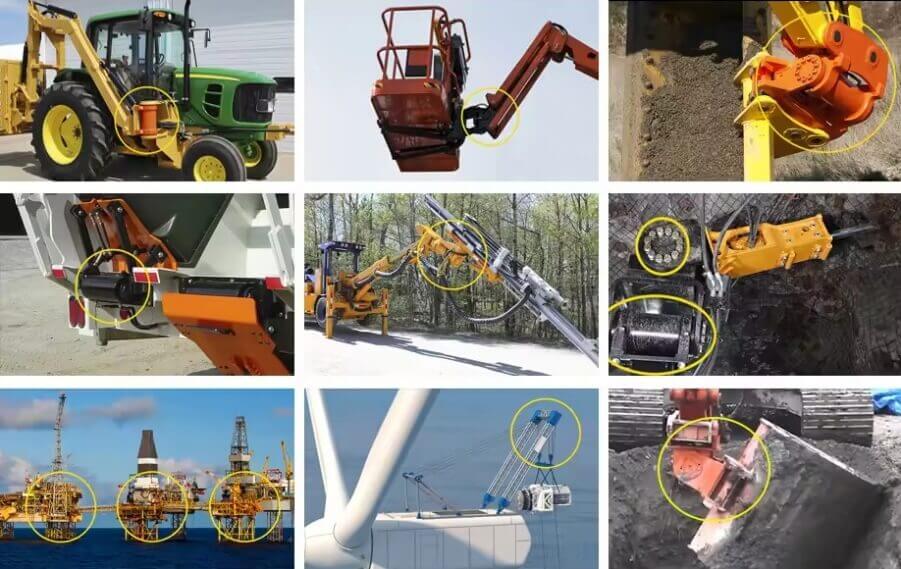
Rotary actuator: It is widely used in equipment that requires continuous rotation, such as the joints of robots, rotating workbenches in automated production lines, yaw systems of wind turbines, steering systems of ships, etc., which can meet the requirements of equipment for high-precision and high-speed rotation.
Swing cylinder: It is often used in working devices that only need to swing within a certain angle range, such as the bucket flipping mechanism of loaders and excavators, the car body lifting mechanism of dump trucks, and the rotary feeding device of punch presses. It can realize the flipping and dumping of materials in these equipment.
Performance Parameters
Rotary actuator: Generally, it has a high speed and torque output capacity. Its torque size is related to factors such as the pressure of the hydraulic system, the size of the cylinder, and the efficiency of the transmission mechanism. In some high-precision applications, the positioning accuracy of the rotary actuator can reach a high level. For example, the positioning accuracy of the rotary actuator for some robot joints can be controlled within ±0.1°.
Swing cylinder: Its output torque is relatively small, but it can provide sufficient power to complete the corresponding work within its designed swing angle range. The swing frequency of the swing cylinder is generally low, usually between a few times and dozens of times per minute, depending on the working requirements of the equipment and the specifications of the cylinder.
Control Method
Rotary actuator: Proportional valves or servo valves are usually used for precise speed and position control. By controlling the flow and direction of the hydraulic oil, the speed, direction, and angle of the rotating shaft can be precisely controlled. In some systems with a high degree of automation, it can also be used in conjunction with position sensors such as encoders to achieve closed-loop control and further improve control accuracy.
Swing cylinder: Generally, ordinary electromagnetic reversing valves are used for control. By controlling the hydraulic oil to enter different chambers of the cylinder, the forward and reverse swing of the swing axis is achieved. For some applications that require high swing angle and position accuracy, proportional valves or additional limit devices can also be used to improve control accuracy.
The above are some differences between rotary actuators and swing cylinders. If you need more specific help, please contact us.